若x → = ( x 1 , x 2 , . . . , x n ) y → = ( y 1 , y 2 , . . . , y n ) x → ∈ R n y → ∈ R n
那么向量的线性运算规则如下。
x → ± y → = ( x 1 ± y 1 , x 2 ± y 2 , . . . , x n ± y n )
λ x → = ( λ x 1 , λ x 2 , . . . , λ x n ) λ ∈ R
向量的模:| x → | = ( x 1 2 + x 2 2 + . . . + x n 2 )
数量积
空间平面方程 的一般形式是:a x + b y + c z + d = 0
两个平面交线构成的空间直线方程的一般形式是: { a 1 x + b 1 y + c 1 z + d 1 = 0 a 2 x + b 2 y + c 2 z + d 2 = 0
空间曲线参数方程 的一般形式是: { x = x ( t ) y = y ( t ) z = z ( t )
设D R 2 f : D → R D 二元函数 ,可记为z = f ( x , y ) ( x , y ) ∈ D
设二元函数 f ( x , y ) D P 0 ( x 0 , y 0 ) D A ε δ P ( x , y ) ∈ D ∩ U ˚ ( P 0 , δ ) lim ( x , y ) → ( x 0 , y 0 ) f ( x , y ) = A A f ( x , y ) ( x , y ) → ( x 0 , y 0 ) 极限 ,记为| f ( x , y ) − A | < ε
由于二元函数 是空间平面方程 中的某一个点,因此它的极限 的趋近方向可以有无穷多个。
当任意方向趋近于某点时,函数值都趋近于同一个值,此时的极限 才存在。
一切多元初等函数在其定义区间内都是连续的。
一般地,如果f ( x , y ) ( x 0 , y 0 ) f ( x , y ) f ( x , y ) ( x 0 , y 0 ) lim ( x , y ) → ( x 0 , y 0 ) f ( x , y ) = f ( x 0 , y 0 )
在有界闭区间D , D ∈ R 多元连续函数必然在D
在有界闭区间D , D ∈ R 多元连续函数必然能取得介于最大值和最小值之间的任何值。
设函数z = f ( x , y ) ( x 0 , y 0 ) lim Δ x → 0 f ( x 0 + Δ x , y 0 ) − f ( x 0 , y 0 ) Δ x 极限 为函数z = f ( x , y ) ( x 0 , y 0 ) 偏导数 ,记为∂ z ∂ x | y = y 0 x = x 0 , ∂ f ∂ x | y = y 0 x = x 0 , z x | y = y 0 x = x 0 f x ( x 0 , y 0 )
若函数z = f ( x , y ) ( x , y ) 偏导数 均存在,那么这个偏导数 就是关于点( x , y ) 偏导函数。
对x 偏导函数记为∂ z ∂ x , ∂ f ∂ x , z x f x ( x , y )
对y 偏导函数记为∂ z ∂ y , ∂ f ∂ y , z y f y ( x , y )
另外,偏导数 的数学符号∂ z ∂ x 一元函数d y d x d y d x 商。
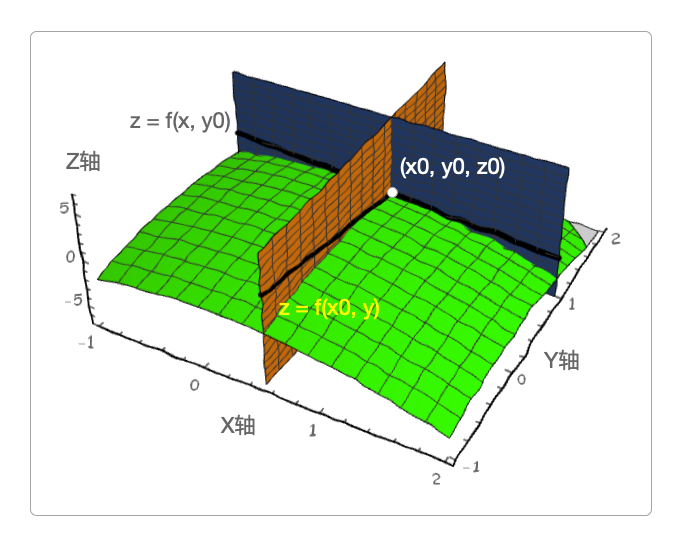
偏导数 的几何意义在于求曲线在某个点处的切线对于X 斜率 。
偏导数的几何意义 偏导数 f x ( x 0 , y 0 ) ( x 0 , y 0 , z 0 ) X 斜率 。
偏导数 f y ( x 0 , y 0 ) ( x 0 , y 0 , z 0 ) Y 斜率 。
极大值:设函数z = f ( x , y ) D P 0 ( x 0 , y 0 ) D P 0 U ( P 0 ) ∈ D P 0 x , y f ( x , y ) < f ( x 0 , y 0 ) f ( x 0 , y 0 ) 极大值。
极小值:设函数z = f ( x , y ) D P 0 ( x 0 , y 0 ) D P 0 U ( P 0 ) ∈ D P 0 x , y f ( x , y ) > f ( x 0 , y 0 ) f ( x 0 , y 0 ) 极小值。
根据一元函数 的微分 公式Δ y = A · Δ x + ∘ ( Δ x ) 二元函数 z = f ( x , y ) 微分 公式为:Δ z = A · Δ x + B · Δ y + ∘ ( Δ x , Δ y ) A = ∂ f ∂ x B = ∂ f ∂ y
设函数z = f ( x , y ) ( x , y ) ( x , y ) Δ z = f ( x + Δ x , y + Δ y ) − f ( x , y ) Δ z = A · Δ x + B · Δ y + ∘ ( ρ ) , ρ = ( Δ x ) 2 + ( Δ y ) 2 A , B Δ x , Δ y z = f ( x , y ) ( x , y ) 可微分,A · Δ x + B · Δ y ( x , y ) 全微分 ,记为d z = A · Δ x + B · Δ y
全微分 存在的充分条件是:函数z = f ( x , y ) 偏导数 在点( x , y )
全微分 存在的必要条件是:点( x , y ) 偏导数 存在,且d z = ∂ z ∂ x · Δ x + ∂ z ∂ y · Δ y
一元函数 中某点的微分 表示可以用该点切线逼近的方式来表示该函数。
二元函数 中某点的全微分 表示可以用该点切面逼近的方式来表示该函数。
方向导数 和梯度下降 是整个微积分 中的重点之一,方向导数 的意义在于 在变化率最大的方向上寻找函数极值
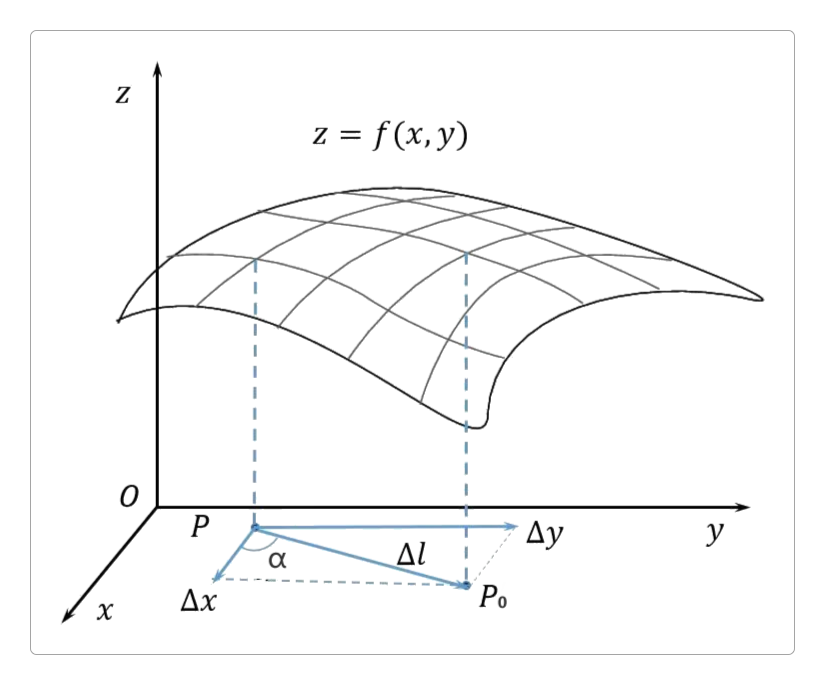
单位方向向量 e l → = ( cos α , cos β ) 射线 以P 0 ( x 0 , y 0 ) e l → 射线 的参数方程为 { x = x 0 + t · cos α y = y 0 + t · cos β ( t ≥ 0 )
函数z = f ( x , y ) P 0 P 0 P Δ z = f ( x 0 + t cos α , y 0 + t cos β ) − f ( x 0 , y 0 ) P 0 P | P 0 P | = ( x 0 + t cos α − x 0 ) 2 + ( y 0 + t cos β − y 0 ) 2 = t
当P l P 0 Δ z P 0 P = f ( x 0 + t cos α , y 0 + t cos β ) t 极限 即为方向导数 ,记为∂ f ∂ l | ( x 0 , y 0 ) = lim t → 0 + f ( x 0 + t cos α , y 0 + t cos β ) − f ( x 0 , y 0 ) t = g ( α , β )
方向导数 也就是说,g ( α , β )
当全微分 存在时,f ( x 0 + t cos α , y 0 + t cos β ) − f ( x 0 , y 0 ) = f x ( x 0 , y 0 ) · t cos α + f y ( x 0 , y 0 ) · t cos β + ∘ ( t ) 方向导数 化简得到g ( α , β ) = f x ( x 0 , y 0 ) · cos α + f y ( x 0 , y 0 ) · cos β
记向量 a → = ( f x ( x 0 , y 0 ) , f y ( x 0 , y 0 ) ) e l → = ( cos α , cos β ) g ( α , β ) = f x ( x 0 , y 0 ) · cos α + f y ( x 0 , y 0 ) · cos β = | a → | · | e l → | · cos θ θ 向量 a → 向量 e l →
当a → e l → g ( α , β ) f x 2 ( x 0 , y 0 ) + f y 2 ( x 0 , y 0 )
当a → e l → g ( α , β ) − f x 2 ( x 0 , y 0 ) + f y 2 ( x 0 , y 0 )
向量 a → = ( f x ( x 0 , y 0 ) , f y ( x 0 , y 0 ) ) 梯度 ,记为g r a d f ( x 0 , y 0 )
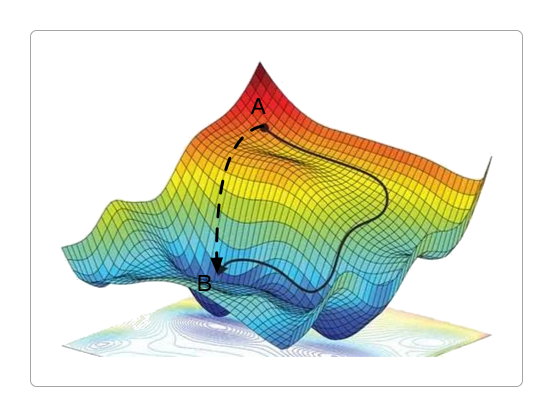
梯度 指明了函数变化率最大和最小的方向。
梯度下降 需要注意的是:梯度下降 并不是全局变化最快的,而是局部最快。
显然,从全局角度来说,从点A B
通过Python 演示梯度下降 算法。
# 用梯度下降算法求函数最小值:z = x^2 + 2y^2 import matplotlib.pyplot as plt # 搜索步长 m = 0.01 x = - 10 y = 30 L = x ** 2 + 2 * y ** 2 # 迭代次数 n = 0 # 迭代误差 err = 1 # 迭代阈值 threshold = 0.0000001 value = [] while (err > threshold) and n < 100 : # 迭代 x = x - 2 * m * x y = y - 4 * m * y # 计算前后两次迭代后函数差值的绝对值 err = abs (x ** 2 + 2 * y ** 2 - L) value. append (err) L = x ** 2 + 2 * y ** 2 # print(x, y, n) n = n + 1 print (x, y, L, n) plt. plot (value) plt. show ()